Los humanos y los robots interactúan cada vez más en entornos construidos como ciudades, edificios, pasarelas y parques. Al ofrecer adaptabilidad, rentabilidad y escalabilidad, los robots se están integrando gradualmente en diversos aspectos de la vida cotidiana, desde la fabricación hasta la atención sanitaria y la hostelería. Los investigadores de la Universidad de Tecnología y Diseño de Singapur (SUTD) han desarrollado una tecnología de gemelos digitales dentro del software de simulación de robots para evaluar la idoneidad de un robot para su implementación en entornos construidos simulados.
Garantizar que los robots puedan navegar y operar eficazmente dentro de entornos construidos es crucial para su adopción y aceptación generalizadas. Sin embargo, lograr que robots de servicio totalmente autónomos operen en entornos humanos es todavía un objetivo lejano, ya que las limitaciones espaciales en el entorno construido restringen la capacidad de rendimiento de un robot.
Para abordar estas limitaciones, los investigadores exploraron un enfoque innovador en su artículo ‘Mejora de la inclusión de robots en el entorno construido: una evaluación asistida por gemelos digitales del cumplimiento de las pautas de diseño’. En el documento se demuestra una metodología novedosa que utiliza gemelos digitales para establecer la utilidad de las pautas de diseño de entornos construidos para robots. También modelan algunos arquetipos y entornos de robots como gemelos digitales para examinar el comportamiento de los robots dentro de los entornos.
Metodología en tres fases
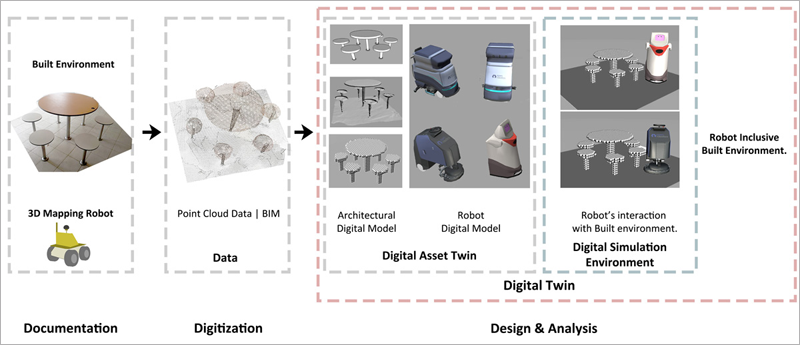
La metodología utilizada se divide en tres fases: documentación, digitalización y análisis del diseño. En primer lugar, para la simulación es necesaria la documentación in situ del entorno. Puede realizarse mediante técnicas de recopilación directa de datos, escaneo láser o fotogrametría. Idealmente realizada durante el proceso de diseño del edificio, la recopilación directa de datos utiliza el modelado de información de construcción (BIM). Cuando ya se ha construido un edificio, se pueden utilizar técnicas de fotogrametría o escaneo láser para generar datos de nubes de puntos para su procesamiento.
En segundo lugar, la digitalización se centra en hacer que el modelo digital del entorno construido sea adecuado para el software de simulación del robot. En este paso, los datos de la nube de puntos se reconstruirán en un espacio digital y se utilizarán para generar modelos tridimensionales (3D) del entorno construido.
Finalmente, se diseña y analiza el modelo digital. Utilizando el modelo digitalizado del entorno en el software de simulación de robots, se prueban los comportamientos y las interacciones de varios robots dentro del entorno. Los escenarios virtuales se crean basándose en pautas de diseño existentes de entornos construidos, y los robots se evalúan en cuanto a su navegación, planificación de rutas e interacción con el entorno.
Pruebas de cuatro robots de limpieza
En la investigación se utilizaron gemelos digitales para probar cuatro robots de limpieza diferentes en seis entornos diferentes que cumplían las pautas de diseño de accesibilidad. De los cuatro robots, uno completó la mayor cantidad de objetivos y tuvo el mejor rendimiento en los entornos simulados. Es importante señalar que la inclusión de los robots no siempre se traduce en eficiencia en el rendimiento de los robots. Sin embargo, un entorno inclusivo promueve una mejor accesibilidad para los robots, permitiéndoles completar sus tareas correctamente.
Dado que los robots se utilizan cada vez más en aplicaciones urbanas, como limpieza, logística y mantenimiento de edificios, los hallazgos de este estudio ayudarán a mejorar las pautas de diseño para entornos construidos que se adapten a los robots. Mejores pautas de diseño permitirán la perfecta integración de los robots en espacios centrados en el ser humano y su mayor eficiencia en diversas aplicaciones.
En el futuro, el equipo de investigación pretende ampliar los métodos actuales y generar de forma autónoma las modificaciones de infraestructura necesarias para mejorar la accesibilidad de los robots móviles mediante el uso de diseño, inteligencia artificial y tecnología. Asimismo, esperan desarrollar un conjunto de pautas de diseño y recomendaciones para construir infraestructura compatible con robots.